Sustainable Platform for Educational Real-Time Experiments
Summary of the Project
The "Sustainable Platform for Educational Real-Time Experiments" (SPERTE) project, led by Gert Witvoet with involvement from Tom Oomen, has been aimed at developing a demonstrator setup for conducting real-time experiments in an educational environment, suitable for scaling up at reasonable hardware costs. Initially targeted at the Master course "Control Engineering" (CE; 4CM00), it also intends to be applicable in the Bachelor courses "Signals and Systems" (S&S; 4CA00), Robot Arm (4GB20) and the Master course "Learning Control" (LC; 4SC070). CE, a core course in various Master programs, attracts over 200 students annually. However, the current experimental setup, involving student laptops, a motion setup, and an outdated real-time operating system (RTOS), has been reaching its capacity limits and becoming less representative of industry standards. To address this, SPERTE has been focusing on creating a sustainable and affordable alternative that does not rely on student laptops and aligns with industrial practices. The proposed solution involves developing a dedicated, affordable target-pc to serve as a real-time controller, interfacing with existing equipment and using standard campus software like Matlab.
Aim of the Project
The SPERTE project aimed to design a demonstrator of a dedicated rapid-prototyping target-pc to replace the previous RTOS-dependent setup used in the CE course. This target-pc acts as a real-time controller, communicating with the motion setup and data-acquisition device (E-box). The primary objectives was to develop a nearly maintenance-free hardware solution that eliminates dependency on student laptops, ensure sustainable software support using commercial tools like Matlab, and enhance student convenience by allowing the use of their own operating systems. Additionally, the project aimed to provide students with industry-relevant experience by resembling commercial real-time solutions.
The realized SPERTE platform indeed successfully addresses the above-mentioned aims and targets. Several prototypes have been realized and extensively tested by students in pilot tests during CE courses. The lessons learned have led to significant implementation improvements, yielding a platform that is so reliable, well-performing, and affordable that it has been decided to adopt the SPERTE solution for the complete CE course. As such, the hardware for about 50 systems has already been procured, and the developed software has been deployed on this hardware, so that all CE students are now actively using SPERTE as a real-time control platform. Future plans include investigating deployment to other courses within Mechanical Engineering, and further dissemination to other faculties or even beyond university boundaries.
Results and learnings
The platform’s main driver is a low-cost Raspberry Pi (version 4 or higher), which functions as the target-pc for running a controller. This Raspberry Pi is equipped with a custom-made image, optimized for real-time performance and loaded with Ethercat drivers for communication with Beckhoff data acquisition modules, including TU/e’s custom-made E-box systems. The user builds a control scheme in MATLAB Simulink, and by using packages maintained by Mathworks such as Simulink Coder and the Raspberry Pi Support Package, this control scheme is converted to C-code and deployed on the Pi, to be executed there with very low-jitter timing.
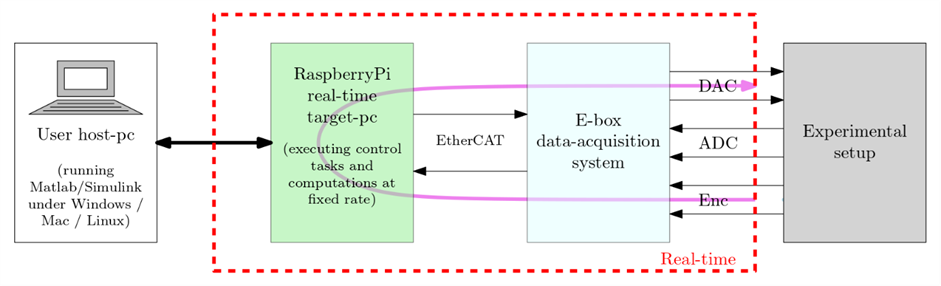
Figure 1: Simplified overview of the SPERTE architecture, indicating the newly developed target-pc in green.
In this way, students and researchers can go from simulation and control design to real-world experiments with minimal overhead. Since the target runs on separate hardware and MATLAB maintains the key interfaces, the platform requires little to no maintenance, speaking to its sustainability requirement. Moreover, this architecture is very much aligned with industry standards. Finally, users are not required to know about or interact with the low-level technical details of the real-time operating system, allowing students to focus on their course content.

Figure 2: Picture of the RaspberryPi target-pc as part of the SPERTE platform.
Since the development of the first prototype of SPERTE in 2021, SPERTE has been adopted as a standard for real-time experiments in Control Engineering, Learning Control, Robot Arm, as well as numerous MSc projects, internships, Bachelor End Projects and PhD experiments. SPERTE has even been used for demonstration setups on conferences and fairs. Over these last years, SPERTE has matured from a prototype to a robust, convenient and flexible platform for real-time experiments.
Figure 3: SPERTE platform used in a demonstration with a printer setup at a conference.
FOR MORE INFORMATION, PLEASE CONTACT:

